Авторобот будет видеть как человек
Компания Cognitive Technologies, являющаяся основным разработчиком системы искусственного интеллекта в российском проекте по созданию беспилотного транспортного средства на базе КАМАЗ разработала технологию, позволяющая автороботу видеть и понимать участников дорожной сцены по тем же принципам, как это делает человек. В компании считают, что это позволяет более эффективно распознавать дорожную сцену и в итоге, может послужить серьезным конкурентным преимуществом в соперничестве с известными зарубежными разработчиками автороботов.
Известно, что возможность видеть удаленные предметы человеку обеспечивает узкая зона фовеального зрения (или центрального), находящаяся в центре зрительной оси глаза (см. рис. 1). Именно она позволяет видеть их в высоком разрешении. При этом, остальные элементы сцены, находящиеся в зонах периферийного и близкого к периферийному зрению, наблюдаются в низком разрешении.

Рис 1
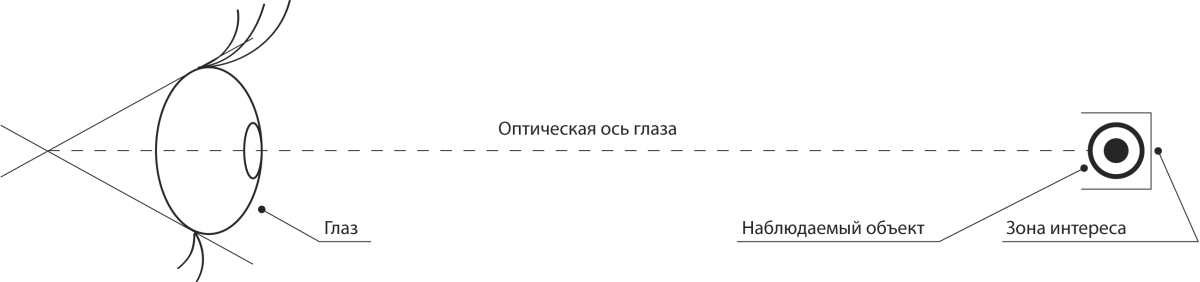
По заявлению компании, ей удалось построить компьютерную модель так называемой зоны интереса - узкой области фовеального зрения, окружающую наблюдаемый объект (см. рис. 2)».
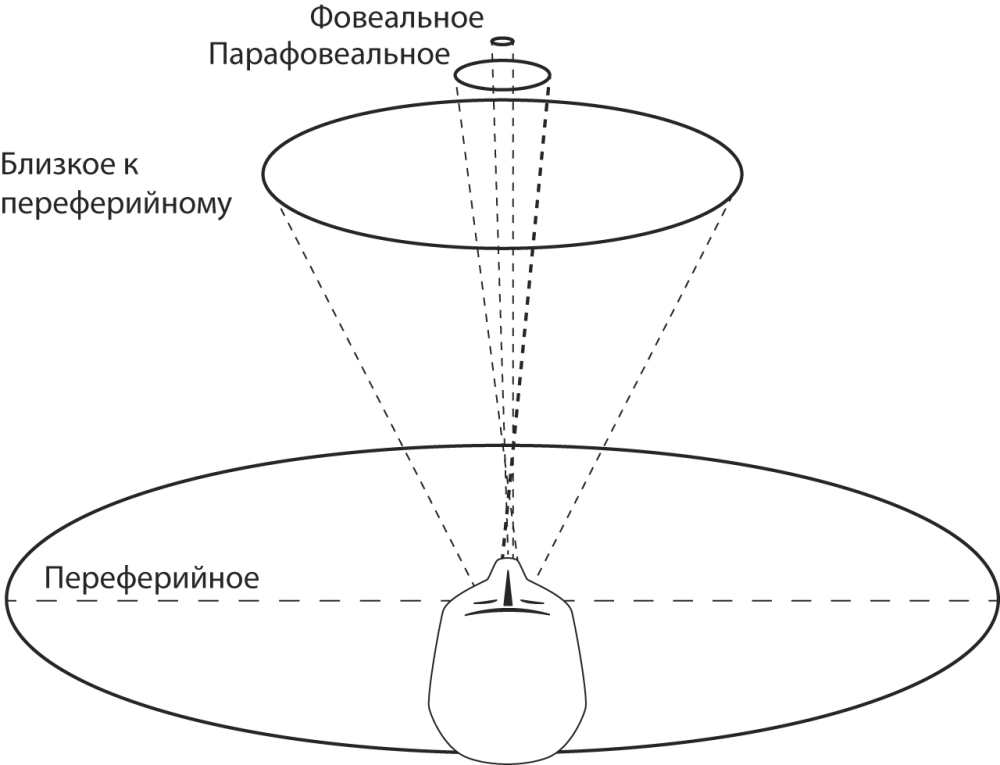
Рис 2.
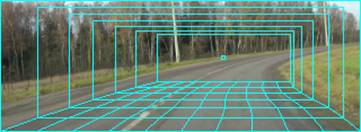
Такой подход позволяет в любой момент времени видеть в высоком разрешении лишь те элементы дорожной сцены (дорожное полотно, обочина, транспортные средства, знаки и т.д.), которые нужны для анализа текущей ситуации. Разработанная технология дает возможность обрабатывать только необходимую информацию, причем с более высокими показателями качества. Это дает преимущество в экономии вычислительных ресурсов и повышении быстродействия обработки информации, когда вместо всего снятого с видеокамеры изображения, достаточно обработать 5-7 его процентов. Технология успешно работает на всех элементах дорожной сцены, находящихся как на близком, так и на далеком расстоянии от наблюдателя.
В основе предложенного метода лежит принцип внутреннего самоподобия дорожной сцены. Разработчики научились выявлять наиболее общие, фундаментальные признаки, присуще дорожному полотну, будь это автомагистраль, проселочная или грунтовая дорога. Это позволяет распознавать дорожное полотно с высокой точностью и обеспечивать устойчивую работу разработанных на основе новой технологии Cognitive Technologies алгоритмов на различных конфигурациях дороги и в различных условиях: поворотах в разные стороны, подъемах, спусках, в ночное время, зимний период, а также в неблагоприятных погодных и климатических условиях.
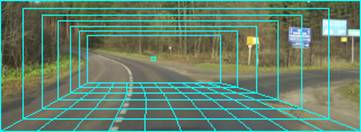
Созданная технология получила название «виртуальный тоннель», поскольку именно такую форму напоминает удаляющаяся последовательность прямоугольных зон интереса.
Компания Cognitive Technologies и ОАО «КАМАЗ» в феврале 2015 года объявили о начале совместного проекта, целью которого является создание к 2020 году на базе автомобиля КАМАЗ беспилотного транспортного средства нового поколения, призванного обеспечить безопасность грузового автомобильного транспорта и дорожного движения на дорогах междугороднего сообщения.

На реализацию проекта государством, в лице Минобрнауки России, было выделено 300 млн. рублей.
Сегодня беспилотный КАМАЗ завершил два этапа полигонных испытаний в Татарстане и Московской области и способен в автономном режиме совершать простейшие маневры (поворот, разворот, движение, змейкой и др.), останавливаться перед препятствиями, двигаться в организованной колонне.
Особенностью проекта является возможность реальной работы в российских условиях. В отличие от зарубежных разработчиков, ориентирующихся во многом, на идеальные условия дорожного движения (качественную разметку, благоприятные погодные условия и т.д.), подход Cognitive Technologies к созданию системы машинного зрения позволяет распознавать дорожную сцену (в том числе границы дороги, ширину полос движения и т.д.) в отсутствии какой-либо разметки.
Разрабатываемый комплекс призван обеспечить автоматическую работу транспорта при различных погодных условиях кроме случаев недостаточной видимости, определяемых требованиями ПДД. Система обязана детектировать пешеходов вне зависимости от направления их движения. Время, отведенное для обнаружения опасности и реакции на нее, составит не более 0.3 сек. Также предусматривается возможность обнаружения на дороге практически любых препятствий, включая животных, в том числе и собак.








