Технологии управления скоростью вращения вентиляторов
Управление по постоянному току
Управление с использованием широтно-импульсной модуляции напряжения
 авно уже прошли те времена, когда в компьютерах использовалось пассивное охлаждение — такие компьютеры были абсолютно бесшумными, но малопроизводительными. По мере роста производительности процессоров и других компонентов ПК росло и их энергопотребление и, как следствие, компоненты ПК становились все более «горячими». Поэтому процессоры стали оснащать массивными радиаторами, а вскоре к ним добавились и вентиляторы, то есть пассивное охлаждение процессоров уже не могло обеспечить требуемый теплоотвод для поддержания надлежащей температуры, из-за чего стали использовать воздушное охлаждение. По мере роста тактовых частот процессоров увеличивалась эффективность теплоотвода, что достигалось за счет более массивных радиаторов и более быстрых вентиляторов.
авно уже прошли те времена, когда в компьютерах использовалось пассивное охлаждение — такие компьютеры были абсолютно бесшумными, но малопроизводительными. По мере роста производительности процессоров и других компонентов ПК росло и их энергопотребление и, как следствие, компоненты ПК становились все более «горячими». Поэтому процессоры стали оснащать массивными радиаторами, а вскоре к ним добавились и вентиляторы, то есть пассивное охлаждение процессоров уже не могло обеспечить требуемый теплоотвод для поддержания надлежащей температуры, из-за чего стали использовать воздушное охлаждение. По мере роста тактовых частот процессоров увеличивалась эффективность теплоотвода, что достигалось за счет более массивных радиаторов и более быстрых вентиляторов.
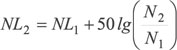
Повышение максимальной скорости вращения вентиляторов влекло за собой рост уровня создаваемого ими шума. Известно, что при увеличении скорости вращения вентилятора от значения N1 до N2 уровень создаваемого им шума возрастает от значения NL1 до NL2, причем:
 ,
,
Предположим, требуется увеличить скорость вращения вентилятора на 10%. При этом на 2 дБ увеличится и уровень шума, создаваемого вентилятором. Зависимость изменения уровня шума вентилятора от нормализованной скорости вращения показана на рис. 1.
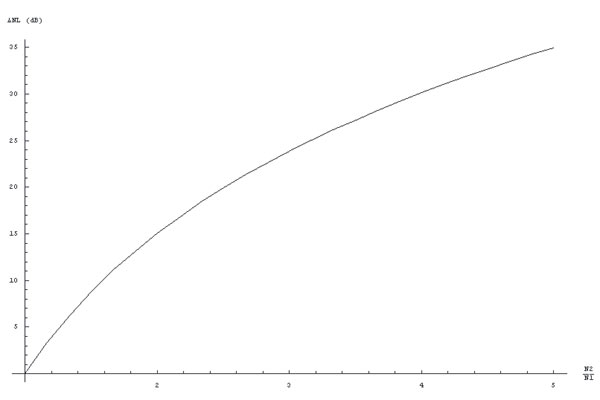
Рис. 1. Зависимость изменения уровня шума (DNL) вентилятора от нормализованной скорости вращения (N2/N1)
Не менее остро, чем проблема охлаждения процессоров, стоит проблема снижения уровня шума. Идеи, заложенные в технологии энергосбережения и снижения тепловыделения, можно использовать и для снижения уровня шума систем охлаждения. Поскольку тепловыделение (и, следовательно, температура) процессора зависит от его загрузки, а при использовании технологий энергосбережения — и от его текущей тактовой частоты и напряжения питания, в периоды слабой активности процессор остывает. Соответственно нет необходимости постоянно охлаждать процессор с одинаковой интенсивностью, то есть интенсивность воздушного охлаждения, определяемая скоростью вращения вентилятора кулера процессора, должна зависеть от текущей температуры процессора.
Существует два основных способа динамического управления скоростью вращения вентиляторов, реализуемых на современных материнских платах: управление по постоянному току и управление с использованием широтно-импульсной модуляции напряжения.
Управление по постоянному току
 ри технологии управления по постоянному току (Direct Current, DC) меняется уровень постоянного напряжения, подаваемого на электромотор вентилятора. Диапазон изменения напряжения составляет от 6 до 12 В и зависит от конкретной материнской платы. Данная схема управления скоростью вращения вентилятора довольно проста: контроллер на материнской плате, анализируя текущее значение температуры процессора (через встроенный в процессор термодатчик), выставляет нужное значение напряжения питания вентилятора. До определенного значения температуры процессора напряжение питания минимально, и потому вентилятор вращается на минимальных оборотах и создает минимальный уровень шума. Как только температура процессора достигает некоторого порогового значения, напряжение питания вентилятора начинает динамически меняться, вплоть до максимального значения в зависимости от температуры. Соответственно меняются скорость вращения вентилятора и уровень создаваемого шума (рис. 2).
ри технологии управления по постоянному току (Direct Current, DC) меняется уровень постоянного напряжения, подаваемого на электромотор вентилятора. Диапазон изменения напряжения составляет от 6 до 12 В и зависит от конкретной материнской платы. Данная схема управления скоростью вращения вентилятора довольно проста: контроллер на материнской плате, анализируя текущее значение температуры процессора (через встроенный в процессор термодатчик), выставляет нужное значение напряжения питания вентилятора. До определенного значения температуры процессора напряжение питания минимально, и потому вентилятор вращается на минимальных оборотах и создает минимальный уровень шума. Как только температура процессора достигает некоторого порогового значения, напряжение питания вентилятора начинает динамически меняться, вплоть до максимального значения в зависимости от температуры. Соответственно меняются скорость вращения вентилятора и уровень создаваемого шума (рис. 2).

Рис. 2. Реализация динамического управления скоростью вращения вентилятора кулера процессора при изменении напряжения питания
Рассмотренная технология реализована на всех современных материнских платах — как процессоров Intel, так и процессоров AMD. Для ее реализации необходимо установить соответствующую схему управления в BIOS материнской платы и использовать трехконтактный вентилятор (отметим, что большинство процессорных кулеров являются именно трехконтактными): два контакта — это напряжение питания вентилятора, а третий контакт — сигнал тахометра, формируемый самим вентилятором и необходимый для определения текущей скорости вращения вентилятора. Сигнал тахометра представляет собой прямоугольные импульсы напряжения, причем за один оборот вентилятора формируется два импульса напряжения. Зная частоту следования импульсов тахометра, можно определить скорость вращения вентилятора. Например, если частота импульсов тахометра равна 100 Гц (100 импульсов в секунду), то скорость вращения вентилятора составляет 50 об./с, или 3000 об./мин.
Управление с использованием широтно-импульсной модуляции напряжения
 льтернативной технологией динамического управления скоростью вращения вентилятора кулера процессора является широтно-импульсная модуляция (Pulse Wide Modulation, PWM) напряжения питания вентилятора. Идея здесь тоже проста: вместо изменения амплитуды напряжения питания вентилятора напряжение подают на вентилятор импульсами определенной длительности. Амплитуда импульсов напряжения и частота их следования неизменны, и меняется только их длительность, то есть фактически вентилятор периодически включают и выключают. Подобрав частоту следования импульсов и их длительность, можно управлять скоростью вращения вентилятора. Действительно, поскольку вентилятор обладает определенной инертностью, он не может мгновенно ни раскрутиться, ни остановиться (рис. 3).
льтернативной технологией динамического управления скоростью вращения вентилятора кулера процессора является широтно-импульсная модуляция (Pulse Wide Modulation, PWM) напряжения питания вентилятора. Идея здесь тоже проста: вместо изменения амплитуды напряжения питания вентилятора напряжение подают на вентилятор импульсами определенной длительности. Амплитуда импульсов напряжения и частота их следования неизменны, и меняется только их длительность, то есть фактически вентилятор периодически включают и выключают. Подобрав частоту следования импульсов и их длительность, можно управлять скоростью вращения вентилятора. Действительно, поскольку вентилятор обладает определенной инертностью, он не может мгновенно ни раскрутиться, ни остановиться (рис. 3).
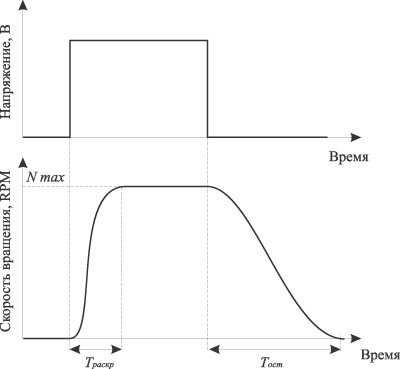
Рис. 3. Реакция вентилятора на импульс напряжения
Если длительность импульса напряжения (Ton) меньше характерного времени раскрутки вентилятора (Ton < Tраскр), а длительность промежутка времени, в течение которого на вентилятор не подается напряжение (Toff), меньше характерного времени останова вентилятора (Toff < Tост), то при подаче на вентилятор последовательности таких импульсов он будет вращаться с некоторой средней скоростью, значение которой определяется соотношением времен Ton и Toff (рис. 4).
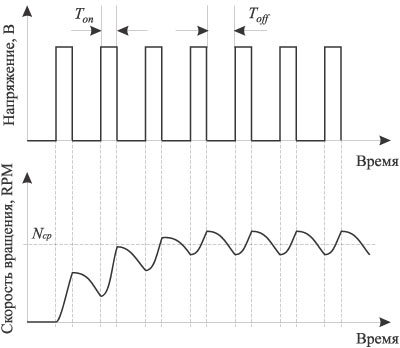
Рис. 4. Управление скоростью вращения вентилятора при широтно-импульсной модуляции напряжения
Отношение времени Ton к периоду следования импульсов (Ton + Toff), измеряемой в процентах, то есть
 .
.
называется скважностью импульсов. Если, к примеру, скважность составляет 30%, то время, в течение которого на вентилятор подается напряжение, составляет 30% от периода импульса.
Реализации широтно-импульсной модуляции напряжения вентилятора осуществляется с помощью PWM-контроллера на материнской плате, причем данный тип управления поддерживается только материнскими платами для процессоров Intel.
PWM-контроллер, в зависимости от текущей температуры процессора, формирует последовательность импульсов напряжения с определенной скважностью, однако это — еще не импульсы напряжения, которые подаются на электродвигатель вентилятора. Последовательность импульсов, формируемая PWM-контроллером, используется для управления электронным ключом (транзистором), отвечающим за подачу напряжения (12 В) на электродвигатель. Упрощенная схема управления скоростью вращения кулера показана на рис. 5.
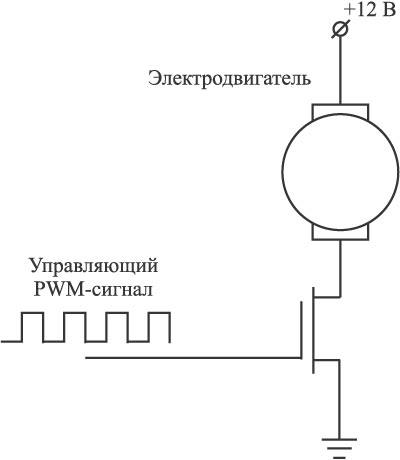
Рис. 5. Схема управления скоростью вращения вентилятора
при использовании PWM-сигнала
Кулеры, поддерживающие PWM-управление, должны быть четырехконтактными: два контакта необходимы для подачи напряжения 12 В, третий контакт — это сигнал тахометра, формируемый самим вентилятором и необходимый для определения текущей скорости вращения, а четвертый контакт используется для связи с PWM-контроллером.
Как уже говорилось, при широтно-импульсной модуляции напряжения для изменения скорости вращения вентилятора меняется скважность импульсов, но не частота их следования. Типичная минимально возможная скважность импульсов составляет 30%, а максимально возможная — 100%, что соответствует постоянному напряжению на вентиляторе. Частота следования PWM-импульсов составляет от 21 до 25 кГц (типичное значение 23 кГц), то есть в течение одной секунды вентилятор включается и отключается приблизительно 23 тыс. раз! На рис. 6 показан пример осциллограммы PWM-импульсов с частотой следования 25 кГц и скважностью 78%.
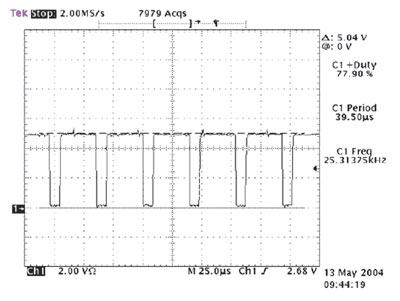
Рис. 6. Осциллограмма PWM-последовательности со скважностью 78% при частоте следования 25 кГц
Скважность PWM-импульсов определяется текущей температурой процессора. Если температура процессора ниже некоторого порогового значения, то скважность импульсов минимальна — следовательно, вентилятор будет вращаться на минимальной скорости и создавать минимальный уровень шума. При превышении температуры процессора порогового значения скважность импульсов начинает линейно меняться в зависимости от температуры, увеличиваясь вплоть до 100%. Соответственно и скорость вращения вентилятора, равно как и уровень создаваемого им шума, будет изменяться в зависимости от температуры процессора (рис. 7).
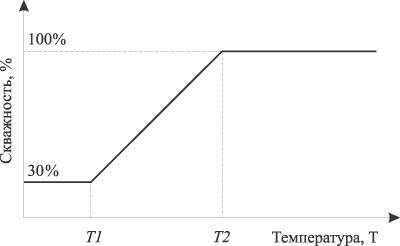
Рис. 7. Зависимость скважности PWM-импульсов
от температуры процессора
В заключение отметим, что, как и в случае с DC-технологией, для реализации PWM-управления скоростью вращения кулера необходимо активировать данный режим управления в BIOS материнской платы.








