Современные мультикоптеры: многообразие моделей и проблема выбора
Для чего приобретают мультикоптеры
Источник питания и продолжительность полета
Дополнительные функции управления
Съемка и трансляция изображения
В последние годы значительно возросла популярность малых беспилотных летательных аппаратов (БПЛА) с дистанционным управлением. И если поначалу они воспринимались большинством людей лишь как высокотехнологичные игрушки, то сейчас ситуация изменилась. В продаже представлено большое количество моделей разных ценовых категорий, многие из которых пригодны не только для развлечения, но и для выполнения вполне серьезных задач — в частности, фото- и видеосъемки (как любительской, так и профессиональной), наблюдения за труднодоступными объектами, доставки небольших грузов и пр.

Октокоптер с зеркальной фотокамерой, установленной на специальном подвесе, позволяет выполнять высококачественную съемку
Катализатором роста популярности малых БПЛА стало появление большого количества недорогих моделей, выпускаемых китайскими компаниями. Ведь не секрет, что для многих пользователей практическое знакомство с подобными летательными аппаратами начинается именно с приобретения доступной по цене модели начального уровня ради развлечения или из любопытства. Кто-то быстро понимает, что это ему неинтересно, а для кого-то восторг от первых полетов перерастает в серьезное хобби.
В этом обзоре мы расскажем об основных особенностях наиболее популярного класса малых БПЛА — мультикоптеров — и дадим читателям несколько советов по выбору подходящей модели.
Что такое мультикоптер
Часто малые беспилотные летательные аппараты называют дронами. У английского слова drone есть много значений, в том числе «беспилотный самолет» и «робот». Соответственно, этот термин обозначает весьма широкий круг беспилотных летательных аппаратов — в том числе радиоуправляемые модели самолетов и вертолетов с двигателями различных типов (электрическими, внутреннего сгорания, реактивными и пр.). В данной публикации мы рассмотрим только одну из категорий малых БПЛА — мультикоптеры. Так называют малые беспилотные летательные аппараты с дистанционным управлением, приводимые в движение несколькими воздушными винтами, расположенными в одной плоскости.
В зависимости от габаритов и конструктивных особенностей количество винтов может варьироваться от 3 до 12. Существует несколько распространенных терминов, обозначающих мультикоптеры с определенным количеством воздушных винтов: квадрокоптер (четыре винта), гексакоптер (шесть винтов) и октокоптер (восемь винтов).

Квадрокоптер (модель XciteRC Rocket 400 GPS)

Гексакоптер

Октокоптер (модель Skyhawk RC Hawk F900)

Редкая разновидность мультикоптеров – модель с тремя воздушными винтами
Большинство современных мультикоптеров приводятся в движение четным количеством воздушных винтов, однако выпускаются модели, оснащенные тремя и пятью винтами. В случае четного количества винтов половина из них вращается в одном направлении, а остальные — в противоположном. Такая схема позволяет изменять высоту, направление движения и выполнять различные маневры путем изменения частоты вращения одного или нескольких воздушных винтов.
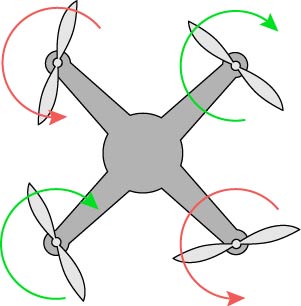
Схема направления вращения воздушных винтов на примере квадрокоптера
В современных мультикоптерах каждый воздушный винт приводится в движение собственным электродвигателем. При этом винт может быть закреплен как непосредственно на оси двигателя (прямой привод), так и связан с последним через механический редуктор (такое решение обычно применяют в средних и больших мультикоптерах).
Для набора высоты скорость вращения всех винтов мультикоптера синхронно увеличивается, а для снижения — уменьшается. Поворот корпуса вокруг вертикальной оси выполняется за счет увеличения или уменьшения частоты вращения группы винтов, вращающихся в одном направлении. Движение по горизонтали осуществляется путем создания крена корпуса в нужном направлении за счет уменьшения частоты вращения группы винтов с соответствующей стороны.
В настоящее время наиболее распространенным вариантом конструкции малых БПЛА являются квадрокоптеры. Такая схема обеспечивает оптимальное сочетание простоты конструкции, веса, цены и летных качеств.
Работой двигателей мультикоптера управляет специализированный мини-компьютер, установленный в его корпусе. Он в режиме реального времени изменяет частоту вращения каждого из двигателей в соответствии с командами, поступающими с пульта ДУ, и с учетом показаний ботовых датчиков (многоосевого гироскопа, акселерометра, электронного компаса и др.). Благодаря этому освоить управление современным мультикоптером не так уж и сложно даже начинающим пользователям.
Для чего приобретают мультикоптеры
Как уже было упомянуто выше, мультикоптеры можно использовать для выполнения различных задач. Если же рассматривать мотивы приобретения бюджетных моделей, то из всего многообразия вариантов можно выделить два наиболее популярных. Первый — это желание освоить и отточить навыки управления летательным аппаратом, выполнять различные фигуры и трюки (то есть пилотаж). Второй — желание получить в свое распоряжение инструмент для ведения фото- и видеосъемки с воздуха.
От поставленных целей во многом зависит выбор размера и других ключевых параметров мультикоптера. Так, для упражнений в пилотаже лучше подходят легкие модели небольшого размера, оснащенные двигателями, способными развить большую тягу. Немаловажным достоинством небольших мультикоптеров является возможность их использования в помещении. Что касается фото- и видеосъемки, то для этой задачи имеет смысл приобретать модель среднего или большого размера, способную поднять в воздух дополнительное оборудование.
Ключевые параметры
При сравнении разных моделей необходимо обратить внимание на следующие параметры:
- размер и вес летательного аппарата;
- тип двигателей и привода;
- способ управления (при помощи собственного пульта или через приложение для мобильных устройств);
- наличие встроенного GPS-приемника и дополнительных функций управления;
- емкость аккумуляторной батареи и максимальное время полета;
- наличие встроенной или съемной камеры
- наличие подвеса для дополнительного оборудования
- вариант поставки, а также наличие запасных частей и аксессуаров в комплекте.
Рассмотрим каждый из пунктов этого списка более подробно.
Классификация по размеру
По размерам мультикоптеры можно условно разделить на три категории.
Малые и миниатюрные модели (некоторые из них без труда умещаются на ладони) подходят для освоения и совершенствования навыков пилотажа. Такие аппараты легко переносить и можно без проблем использовать в помещениях. Что касается уличной эксплуатации, то из-за небольшой массы даже еле заметный ветерок способен заметно сместить и даже опрокинуть такой мультикоптер. По этой же причине модели небольшого размера не подходят для установки подвесного оборудования: мощности крохотных двигателей попросту не хватит, чтобы поднять перегруженный аппарат.

Миниатюрная модель квадрокоптера, без труда умещающаяся на ладони

JJRC H20 Nano — миниатюрный гексакоптер
Наиболее популярными и широко распространенными в настоящее время являются мультикоптеры средних размеров. Такие аппараты достаточно универсальны: их можно использовать как в помещении, так и на улице, а кроме того, задействовать для любительской фото- и видеосъемки. Многие модели оборудованы встроенными или съемными камерами, а также позволяют подвешивать легкое дополнительное оборудование. Широкий диапазон цен представленных в продаже моделей позволяет выбрать подходящий вариант практически для любого бюджета.

Квадрокоптер среднего размера (модель LRP Gravit Vision)
И, наконец, модели большого размера ориентированы на очень состоятельных любителей и профессиональных пользователей. Такие аппараты обладают высокой грузоподъемностью (1,5-2 кг и более), что позволяет подвешивать на них зеркальные фотоаппараты и даже профессиональные видеокамеры, а также задействовать для транспортировки небольших грузов. Кроме того, на борту можно установить дополнительные аккумуляторные батареи для увеличения максимального времени полета.

Большой октокоптер, способный поднять в воздух зеркальную фотокамеру на специальном подвесе
В больших мультикоптерах как правило применяются бесколлекторные электродвигатели с прямым приводом (подробнее об этом – в следующем разделе), благодаря чему эти аппараты обладают хорошей тягой, способны развивать высокую скорость и подниматься на высоту в несколько километров. Естественно, что такие аппараты довольно дороги. Кроме того, для транспортировки крупногабаритного мультикоптера может потребоваться его частичная разборка.
Тип двигателей и привода
Наиболее простым вариантом, который чаще всего применяется в недорогих моделях малого и среднего размера, являются коллекторные электродвигатели с прямым приводом. Такая конструкция обеспечивает минимальный вес и невысокую стоимость аппарата. Наиболее серьезными недостатками коллекторных электродвигателей являются ограниченная мощность и сильный нагрев в процессе работы.
В ряде моделей средних и крупных мультикоптеров применяются коллекторные электродвигатели с механическим редуктором. Такое решение позволяет улучшить тяговые характеристики без существенного увеличения веса и цены аппарата. Однако расплачиваться за это приходится снижением общей надежности и повышением потребляемой мощности.
Наиболее совершенным на данный момент решением являются бесколлекторные электродвигатели с прямым приводом. Главные достоинства такой конструкции — надежность, долгий срок службы, высокая тяга и отличный КПД. Однако бесколлекторные двигатели заметно тяжелее коллекторных и гораздо дороже. По этой причине бесколлекторными двигателями оснащаются в основном дорогие модели среднего и большого размера.
Источник питания и продолжительность полета
В качестве автономных источников питания в современных мультикоптерах используются литий-полимерные или литий-ионные аккумуляторные батареи. Очевидно, что чем выше емкость батареи, тем дольше сможет оставаться в воздухе летательный аппарат. Однако по мере роста емкости аккумулятора увеличиваются его размеры и вес. Таким образом, разработчики мультикоптеров вынуждены искать оптимальный баланс между продолжительностью полета с одной стороны и емкостью, весом и габаритами штатной батареи с другой.
У современных моделей малого и среднего размера полностью заряженная батарея обеспечивает от 5 до 15 минут полета. При этом для полной зарядки аккумулятора может потребоваться от нескольких десятков минут до нескольких часов. Именно поэтому для эксплуатации в полевых условиях имеет смысл приобретать дополнительные аккумуляторные батареи. Это позволяет оперативно заменить разрядившийся источник питания и продолжить полеты без длительного перерыва.
У больших мультикоптеров обычно предусмотрена возможность установки аккумулятора повышенной емкости или дополнительных батарей для увеличения максимального времени полета.
Система управления
Чрезвычайно важный пункт — система управления полетом. Наиболее привычный и удобный (для тех, кто уже имел дело с радиоуправляемыми моделями) вариант — штатный пульт с мини-джойстиками, кнопками и регуляторами. Многие пульты оснащены световыми индикаторами, а некоторые — даже небольшим ЖК-дисплеем, на экран которого выводится информация об основных параметрах и режимах работы. В зависимости от мощности передатчика и используемого частотного диапазона радиус действия штатного пульта может составлять от нескольких сотен метров до 2-3 км.

Простой пульт ДУ

Пульт с монохромным ЖК-дисплеем
Сейчас в продаже представлено немало моделей мультикоптеров, которые не укомплектованы пультом и рассчитаны на управление с мобильных устройств — смартфонов, планшетных ПК и пр. В этом случае на устройство, выполняющее роль пульта, устанавливается специальное приложение, а управление осуществляется при помощи сенсорного экрана, на котором отображаются виртуальные джойстики, регуляторы и пр.

Некоторые модели рассчитаны на управление с мобильного устройства — смартфона или планшетного ПК
При наличии у мультикоптера встроенной камеры и функции трансляции изображения можно выводить на экран мобильного устройства картинку («вид из кабины») в режиме реального времени. Наличие такой возможности обычно обозначается аббревиатурой FPV, которая расшифровывается как First Person View («вид от первого лица»).
Однако на практике управление при помощи мобильных устройств имеет ряд серьезных недостатков.
Начнем с того, что при ярком солнечном освещении изображение на экране плохо читается — что создает серьезные помехи для пилота. Ведь в отличие от аппаратных рычажков и кнопок виртуальные органы управления, отображаемые на экране, невозможно найти на ощупь. Кроме того, нажатия на сенсорный экран обрабатываются операционной системой мобильного устройства с некоторой задержкой, которая практически незаметна при использовании обычных приложений, но может оказаться критичной в случае управления полетом в режиме реального времени. Нельзя также сбрасывать со счетов и вероятность зависания ОС или приложения — что грозит полной потерей управления мультикоптером со всеми вытекающими последствиями.
И, наконец, одним из наиболее существенных недостатков такого варианта является ограниченный радиус действия. Дело в том, что связь летательного аппарата с мобильным устройством осуществляется по Wi-Fi. Встроенные беспроводные адаптеры смартфонов и планшетных ПК даже в идеальных условиях (на открытом пространстве) обеспечивают стабильное соединение на расстоянии не более 50-60 м. Для полетов в помещении этого вполне достаточно, а вот при эксплуатации на улице могут возникнуть проблемы, решить которые можно путем приобретения внешнего усилителя сигнала Wi-Fi. Но это потребует дополнительных затрат.
Для некоторых моделей мультикоптеров, которые в базовой комплектации рассчитаны на управление с мобильного устройства, можно приобрести фирменный пульт как дополнительный аксессуар. Например, для квадрокоптера Bebop Drone компании Parrot доступно дополнительное устройство управления под названием Skycontroller, рассчитанное на работу в паре с планшетом или смартфоном. Оно выполнено в виде штурвала и оборудовано двумя аппаратными джойстиками для управления полетом. В центре имеется кронштейн для крепления мобильного устройства. В корпус пульта Skycontroller встроен двухдиапазонный репитер Wi-Fi с четырьмя внутренними антеннами, который позволяет увеличить радиус действия беспроводного соединения с квадрокоптером до 2 км. Кроме того, у Skycontroller имеется выход HDMI для подключения видеоочков.

Пульт Skycontroller для квадрокоптера Parrot Bebop Drone
Итак, в случае приобретения малых и миниатюрных мультикоптеров, которые планируется эксплуатировать в помещении, управление посредством приложения, запускаемого на мобильном устройстве, является вполне приемлемым решением. Если же выбор пал на модель среднего или большого размера, предназначенную для использования на улице, наличие аппаратного пульта ДУ является обязательным условием для нормальной эксплуатации.
Дополнительные функции управления
Бортовой компьютер, управляющий работой двигателей мультикоптера, позволяет реализовать ряд дополнительных режимов и функций, упрощающих задачу пилота. В этом разделе мы рассмотрим наиболее распространенные из них.
Во многих ныне выпускаемых моделях предусмотрена функция под названием CF Mode или Headless Mode. При ее активации хвостом летательного аппарата считается та его часть, которая в данный момент обращена к пользователю. То есть независимо от фактической ориентации корпуса при подаче команды движения вперед мультикоптер будет удаляться от пульта и наоборот. Таким образом, в любой ситуации для возвращения летательного аппарата к тому месту, где находится пульт, достаточно будет подать команду движения назад.
Зачем это может понадобиться? Дело в том, что корпус большинства современных мультикоптеров (в отличие от радиоуправляемых моделей самолетов и вертолетов) имеет симметричную форму. Из-за этого визуально определить, с какой стороны в данный момент расположен нос, а с какой хвост, бывает довольно затруднительно — особенно если бортовые огни или метки плохо различимы из-за яркого солнца. Разумеется, управление мультикоптером в режиме Headless Mode имеет свою специфику, к которой необходимо привыкнуть.
Хорошим подспорьем для начинающих пилотов (особенно при управлении относительно тяжелыми аппаратами с ценным подвесным оборудованием) станет система выполнения взлета и посадки в автоматическом режиме, реализованная на базе ультразвукового или оптического высотомера. При активации функции автоматической посадки пилоту достаточно выполнить снижение до определенной высоты (которая обычно составляет несколько метров) и отдать соответствующую команду. После этого мультикоптер сам выполнит безопасную посадку в автоматическом режиме.
Широкие возможности по автоматизации управления реализованы в мультикоптерах, оборудованных встроенным GPS-приемником. Некоторые из них способны совершать полет в полностью автономном режиме по маршруту, который был заранее проложен по электронной карте и загружен во встроенную память.
Еще одна полезная функция, реализованная в моделях с встроенным GPS, называется Return To Home (RTH) — то есть «возвращение домой». Она позволяет автоматически вернуть мультикоптер на то место, с которого был произведен взлет, в случае потери связи с пультом из-за воздействия внешних помех или вследствие удаления за пределы радиуса действия передатчика.
Если на мультикоптер планируется устанавливать дополнительное оборудование, оснащенное собственными электроприводами (например, моторизованный подвес для фото- или видеокамеры), то в системе управления должны быть предусмотрены дополнительные каналы для передачи команд исполнительным механизмам.
Съемка и трансляция изображения
Для проведения фото- и видеосъемки с воздуха можно приобрести либо мультикоптер, оборудованный встроенной камерой, либо модель, позволяющую закрепить и поднять в воздух отдельную фото- или видеокамеру. Каждый из этих вариантов имеет свои достоинства и недостатки.

Квадрокоптер Parrot Bebop Drone оборудован встроенной в корпус камерой
Главные преимущества встроенной камеры — минимальные габариты и вес. Кроме того, встроенная камера получает питание от аккумуляторной батареи мультикоптера и управляется со штатного пульта — благодаря чему для проведения съемки не нужно модернизировать конструкцию летательного аппарата и обзаводиться дополнительным оборудованием. И, наконец, это не потребует лишних затрат: цена камеры входит в стоимость мультикоптера.

Квадрокоптер Syma x8cw укомплектован съемной камерой, которая прикрепляется к его корпусу снизу
В некоторых моделях, оснащенных встроенной или съемной камерой, реализована возможность трансляции изображения по Wi-Fi на мобильное устройство. В этом случае пользователь может видеть «живую» картинку с камеры на экране своего планшета или смартфона — что позволяет гораздо более точно компоновать кадр.
Серьезные недостатки встроенных камер — низкая разрешающая способность и не очень высокое качество получаемых изображений. Конечно, сейчас в продаже можно найти модели, оборудованные 10- и даже 20-мегапиксельными встроенными камерами, однако необходимо иметь в виду, что в силу объективных причин разрешающая способность отнюдь не является синонимом качества. За примерами далеко ходить не надо — достаточно объективно оценить фотографии, сделанные при помощи смартфонов. Еще один принципиальный недостаток данного решения заключается в том, что при маневрах летательного аппарата встроенная в его корпус камера изменяет свое положение — что не всегда совпадает с замыслом оператора.
В силу ряда перечисленных выше причин многие предпочитают оснащать мультикоптер внешней камерой. Модели среднего размера способны транспортировать компактные и относительно легкие action-камеры, а большие мультикоптеры позволяют поднять в воздух зеркальный фотоаппарат или профессиональную видеокамеру. Очевидно, что такой вариант позволяет получать фотографии и видеозаписи, намного превосходящие по качеству тот материал, который способны отснять даже лучшие action-камеры и те более встроенные камеры мультикоптеров. Однако есть и ряд проблем.

Квадрокоптер DJI Phantom c action-камерой GoPro Hero 2
Начнем с того, что для установки дополнительного съемочного оборудования понадобится специальная оснастка (обычный или стабилизирующий подвес) и дополнительные аксессуары. В некоторых случаях может потребоваться доработка конструкции летального аппарата. Например, при установке стабилизирующего или дистанционно управляемого подвеса необходимо снабдить его электропитанием от бортовой сети или от отдельной батареи.

Специальный подвес для установки зеркальной фотокамеры
Кроме того, нужна система дистанционного управления съемкой. При использовании action-камер данная проблема решается довольно просто, поскольку многие устройства этой категории оборудованы встроенным адаптером Wi-Fi и могут управляться через мобильное приложение, запускаемое на смартфоне или планшетном ПК. При наличии функции Live View также обеспечивается трансляция «живой» картинки с камеры на экран мобильного устройства. Единственной проблемой может оказаться радиус действия Wi-Fi-соединения, который зачастую оказывается значительно меньше, чем у штатного пульта управления мультикоптера.

Гексакоптер с видеокамерой, закрепленной на управляемом подвесе
Что касается фотоаппаратов и видеокамер, то в большинстве случаев для дистанционного управления их работой необходимо приобрести и установить дополнительный модуль. Это может быть как адаптер Wi-Fi, обеспечивающий возможность управления с мобильных устройств (а заодно передачу изображений и видео), так и приемник для специального пульта со встроенным радиопередатчиком.
Стоит также обратить внимание на то, что использование двух радиосистем, работающих в одном частотном диапазоне (например, пульта ДУ с передатчиком 2,4 ГГц и адаптера Wi-Fi), может привести к возникновению сильных помех. Естественно, это необходимо учитывать при установке дополнительного оборудования на мультикоптер.
Комплектация
Перед приобретением нелишне будет уточнить, в какой конфигурации поставляется мультикоптер. В некоторых случаях не требуется сборка и предварительная регулировка — летательный аппарат готов к эксплуатации сразу же после извлечения из коробки и зарядки аккумуляторной батареи. Такой вариант обычно маркируется аббревиатурой RTF (она расшифровывается как Ready-to-Fly — то есть «готовый к полету»).
Дорогие модели среднего и большого размера нередко поставляются в разобранном виде и иногда требуют установки дополнительных узлов, приобретаемых отдельно. В этом случае пользователю придется либо самому заниматься сборкой и настройкой летательного аппарата (что требует определенной квалификации и времени), либо обратиться к квалифицированному специалисту.
Как правило, в комплект поставки мультикоптера входят запасные воздушные винты — на случай повреждения при аварийной посадке или падении. Кроме того, некоторые варианты комплектации включают дополнительную аккумуляторную батарею, кронштейны для крепления подвесного оборудования и т.д.

Малый квадрокоптер Parrot Rolling Spider укомплектован двумя съемными колесами большого диаметра

В комплект поставки квадрокоптера SkyWalker HM1306 входит съемный каркас
У ряда моделей предусмотрены съемные элементы, обеспечивающие дополнительную защиту винтов (кожухи, решетки, бамперы и т.п.) или даже аппарата целиком. Например, недорогая модель Parrot Rolling Spider укомплектована двумя съемными колесами большого диаметра, которые обеспечивают безопасную эксплуатацию этого квадрокоптера внутри помещений, позволяя ему катиться по любой поверхности (полу, стенам, потолку). С моделью SkyWalker HM1306 поставляется съемный каркас — весьма полезное приспособление для начинающих пилотов.
Заключение
Итак, мы рассмотрели особенности современных мультикоптеров и ряд ключевых параметров, которые позволяют оценить возможности того или иного летательных аппаратов и сравнивать их между собой. При нынешнем многообразии представленных на рынке моделей сделать выбор очень непросто, и лучшим советчиком здесь может быть только личный опыт. Так что разумнее будет начать с приобретения недорогой, но прочной модели малого или среднего размера. Освоить управление такими аппаратами не очень сложно, а в случае серьезной аварии убыток будет не очень существенным. Получив определенный опыт пилотажа и эксплуатации, вы уже будете более-менее четко представлять, какие качества и характеристики мультикоптера являются для вас приоритетными, а какие — второстепенными, и, исходя из этого, сможете вполне осознано подойти к выбору следующей модели.








